Planning API Documentation
Readers guide
Each code documentation section contains:
- A short description of a possible use case
- The definition of the predicate
- A codeblock with multiple examples, each one separated by 2 newlines
The examples are in the following format:
?-followed by a query- The variable instantiations that Prolog found.
Meaning of the symbols in front of the parameter:
?means this can be specified (an input) or be a variable (an output)+means this is only input (it has to be a concrete value)-means this is output (only putting a variable here makes sense for planning)
Meaning of the predicate behavior:
detSucceeds exactly once without a choice pointsemidetFails or Succeeds exactly once without a choice-pointnondetMay succeed any number of times (this meanscut:lazy-cdrmight be needed to get all values)multiAsnondet, but succeeds at least one time
These definitions are the same as on https://www.swi-prolog.org/pldoc/man?section=modes.
High-Level Concepts
In the following the high-level ideas for the exchange between Planning and Knowledge are described for the different challenges.
To successfully utilize the Knowledge-Planning API, the following 4 predicates are important:
create_object(-Object, +Type, +PoseStamped, +Options): Used to instantiate/create new, perceived objectsobject_rel_pose(+Object, +Type, +Options, -PoseStamped): Returns important poses for a given object (e.g. from where to perceive it or where to place it)predefined_origin_location(+Type, -Location): Returns the predefined location for a given object type (e.g. the predefined location of bowls is on inside of Shelf_FIFFJO)next_object(-Object): Returns the next best object to be processed/picked for a given challenge
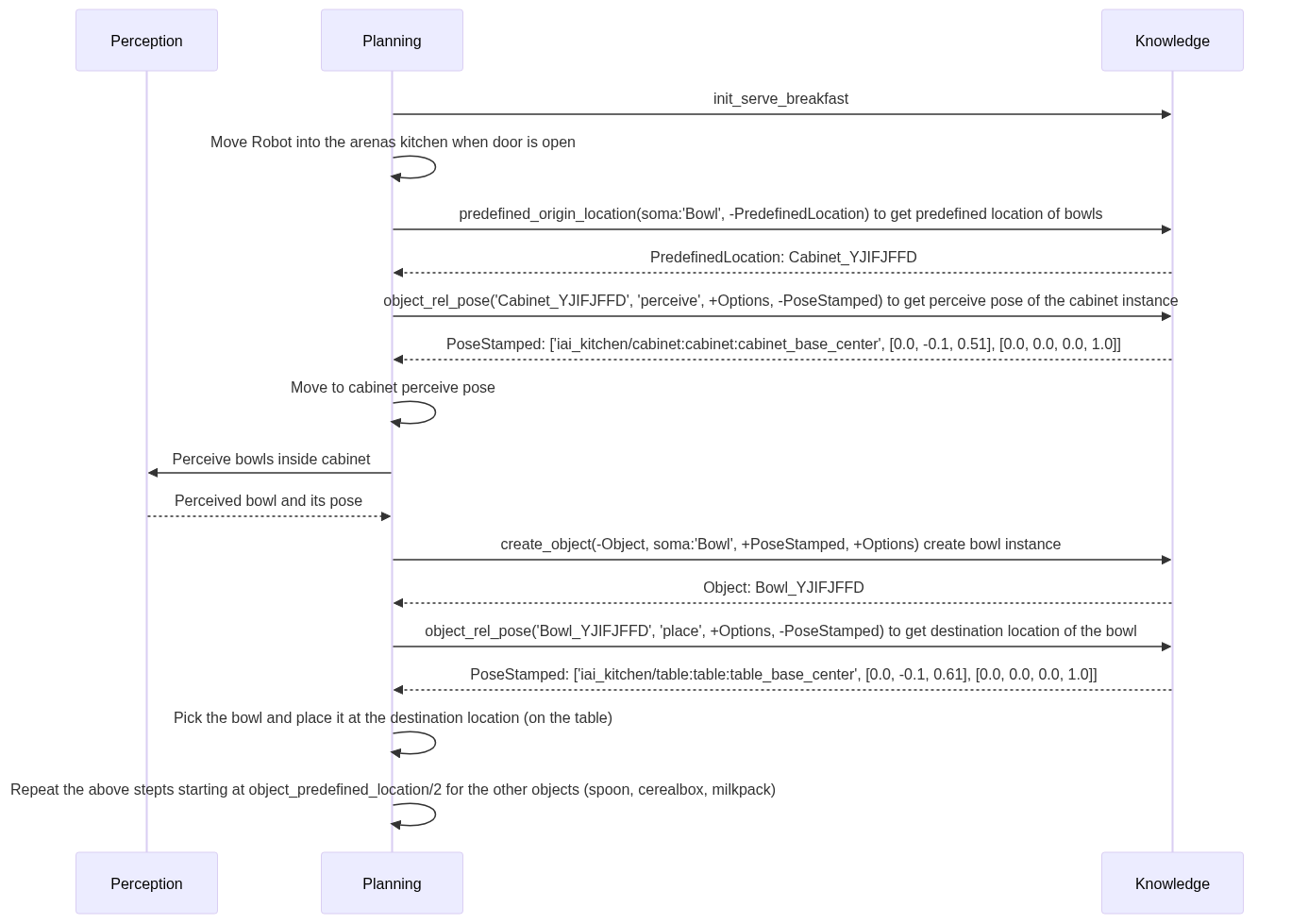
Serve Breakfast
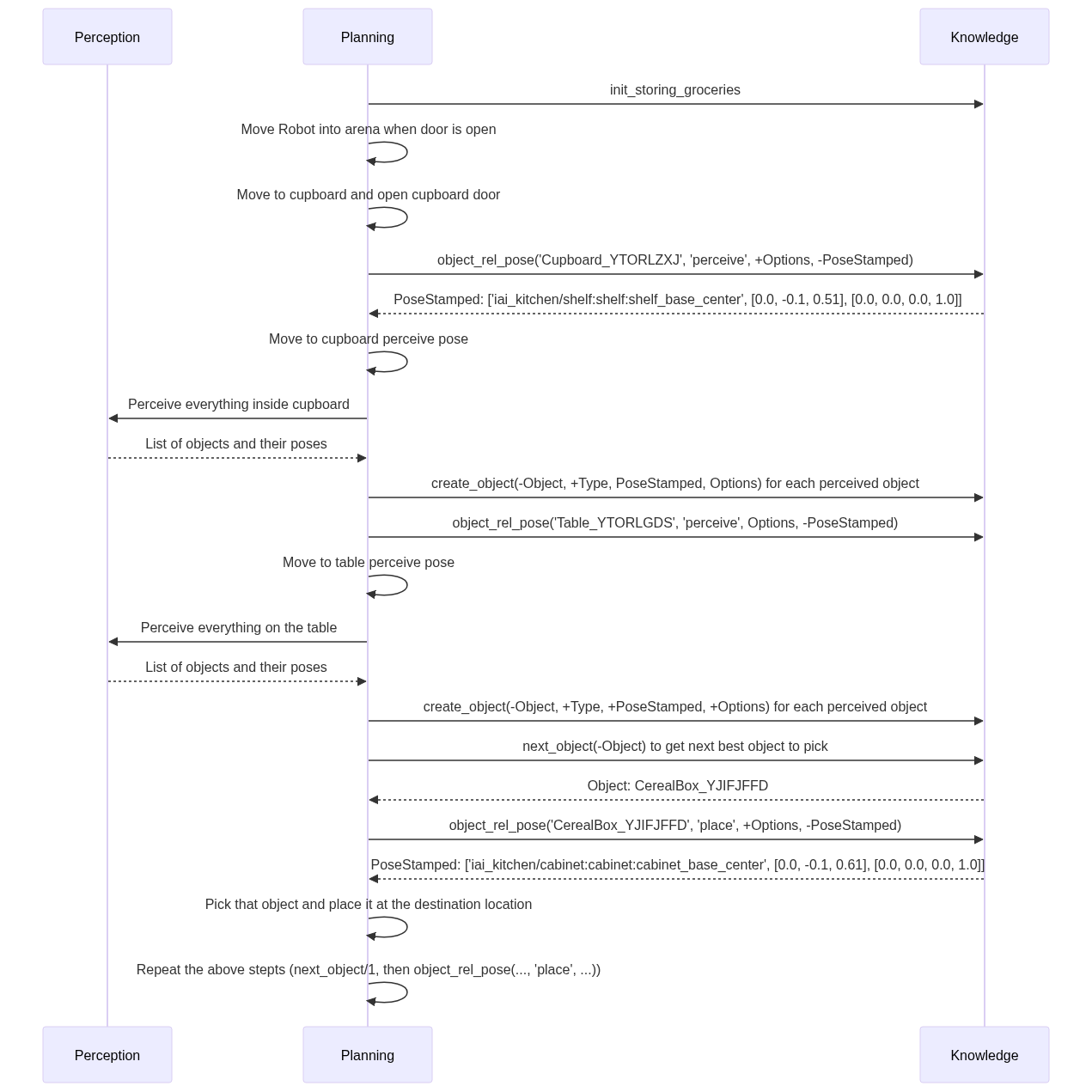
Storing Groceries
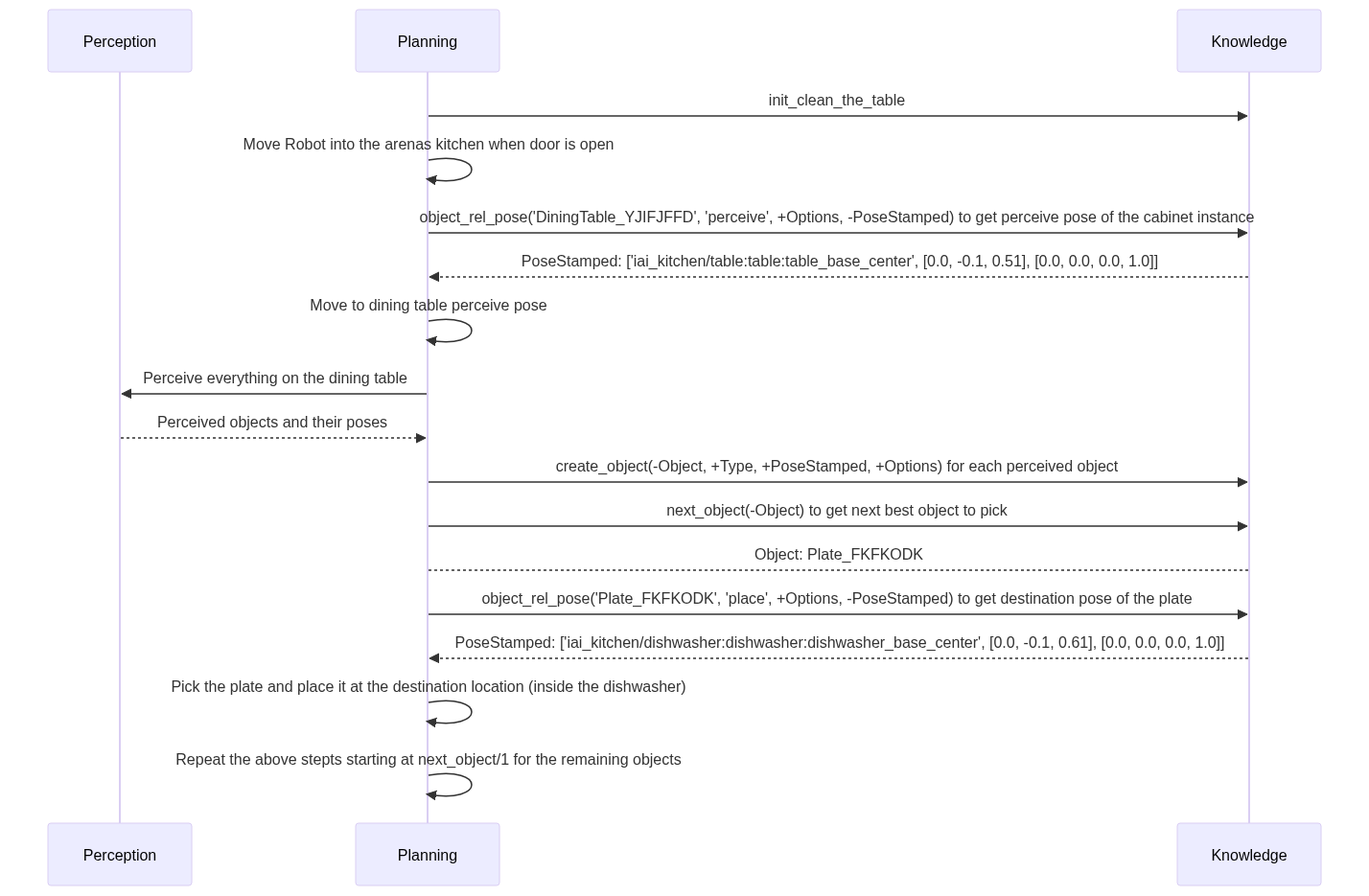
Clean the Table
Data types
Type/Class
An iri, for example 'http://www.ease-crc.org/ont/SOMA.owl#Table' or the shortform soma:'Table' that denotes a class of objects.
Object
An iri, for example 'http://www.ease-crc.org/ont/SOMA.owl#Table_MBOLQEWJ' that denotes an individual object.
PoseStamped
A list of Frame, Position and Rotation. Position and Rotation are each a list of length 3 and 4.
[Frame, [X, Y, Z], [RX, RY, RZ, RW]]
Objects
This section describes the predicates that are used to create and get information about objects. An object is any physical object that has a proper space region. Available objects types are defined in the SUTURO Objects.
Create an object
Create an object of a given Type at the given PoseStamped.
The Type can be the full IRI or the namespace:'Name' form.
The Options that can be processed are:
shape(ShapeTerm)optional - The shape of the object. If not specified, Knowledge will have no shape information about this object.class_confidence- A confidence that a robot has about the recognition of objects
create_object(-Object, +Type, +PoseStamped) is det.
create_object(-Object, +Type, +PoseStamped, +Options) is det.
Example:
?- create_object(Object, 'http://www.ease-crc.org/ont/SOMA.owl#CerealBox', ['iai_kitchen/long_table:table:table_front_edge_center', [0,1,1], [0,0,0.70711,0.70711]]).
Object: http://www.ease-crc.org/ont/SOMA.owl#CerealBox_LTKIUPNG.
?- create_object(Object, soma:'CerealBox', ['map', [0,1,1], [0,0,0.70711,0.70711]], [shape(box(0.1,0.1,0.1))]).
Object: http://www.ease-crc.org/ont/SOMA.owl#CerealBox_BHVKCONR.
Query an object
To get existing objects for a class/type.
Example:
has_type(Object, 'http://www.ease-crc.org/ont/SOMA.owl#CerealBox').
Object: http://www.ease-crc.org/ont/SOMA.owl#CerealBox_LTKIUPNG.
has_type(Object, 'http://www.ease-crc.org/ont/SUTURO.owl#Apple').
Object: http://www.ease-crc.org/ont/SUTURO.owl#Apple_LTKIUPNG ;
Object: http://www.ease-crc.org/ont/SUTURO.owl#Apple_KFJSNPNG ;
Object: http://www.ease-crc.org/ont/SUTURO.owl#Apple_KLDJKPNG.
Pose and shape information
To get or set the pose of an object, use the following predicate.
If an unset variable is passed for PoseStamped, the predicate will try to find a pose in the knowledge base.
If the PoseStamped is fully specified, the predicate will set the pose in the knowledge base.
Example:
% Get the pose of an object
?- object_pose('http://www.ease-crc.org/ont/SOMA.owl#Table_LTKIUPNG', PoseStamped)
PoseStamped: ['map', [1,0,1], [0,0,0,1]]
% Set/Update the pose of an object
?- object_pose('http://www.ease-crc.org/ont/SOMA.owl#Table_LTKIUPNG', ['map', [2,1,0], [0,0,0,1]])
true.
The documentation of object_shape/5 is viewable here.
Because of knowrob#368 this is currently not done via object_shape/5 but via object_shape_workaround/5.
Example:
?- object_shape_workaround(soma:'CerealBox', Frame, ShapeTerm, Pose, Material).
Frame: CerealBox_BHVKCONR,
Material: {'term': ['material', {'term': ['rgba', '_', '_', '_', '_']}]},
Pose: ['CerealBox_BHVKCONR', '_', '_'],
ShapeTerm: {'term': ['box', 0.1, 0.1, 0.1]}.
term stuff is probably translated to a lispier structure, like (box 0.1 0.1 0.1).
There might be a better predicate for this in the future, and the blanks in the pose might be a real position and rotation in the future. The _ indicates that there is no value for this place.
Relative poses
Inside of rooms
For all objects the room they are inside of is computed during creation (create_object, is also called during semantic map initialisation) and position updating (object_pose with a given pose).
The result of this computation can be retrieved using the following predicate:
Examples:
?- is_inside_of(Obj, Room).
Obj: 'http://www.ease-crc.org/ont/SOMA.owl#Table_NDCBRWEY',
Room: 'http://www.ease-crc.org/ont/SUTURO.owl#Arena_BQHSDXOM' ;
Obj: 'http://www.ease-crc.org/ont/SOMA.owl#Table_NDCBRWEY',
Room: 'http://www.ease-crc.org/ont/SUTURO.owl#LivingRoom_DKPLJIOG';
...
?- is_inside_of(soma:'Table_NDCBRWEY',Room).
Room: 'http://www.ease-crc.org/ont/SUTURO.owl#Arena_BQHSDXOM' ;
Room: 'http://www.ease-crc.org/ont/SUTURO.owl#LivingRoom_DKPLJIOG'.
?- is_inside_of(Obj, suturo:'LivingRoom_DKPLJIOG').
Obj: 'http://www.ease-crc.org/ont/SOMA.owl#Table_NDCBRWEY' ;
Obj: 'http://www.ease-crc.org/ont/SOMA.owl#Table_OKRVGFLP' ;
Obj: 'http://www.ease-crc.org/ont/SOMA.owl#Door_EYVRJCHL' ;
Obj: 'http://www.ease-crc.org/ont/SOMA.owl#Table_CWYUNSDX'.
On top of Furniture
For all objects, which are not from the semantic map, the furniture (object from the semantic map) they are ontop of is computed during creation (create_object) and position updating (object_pose with a given pose).
The result of this computation can be retrieved using triples:
Example:
?- triple(Object, soma:isOntopOf, Furniture)
Furniture: 'http://www.ease-crc.org/ont/SOMA.owl#Table_NCPFJOBW',
Object: 'http://www.ease-crc.org/ont/SOMA.owl#CerealBox_GZPBESQD'.
?- triple(Object, soma:isOntopOf, 'http://www.ease-crc.org/ont/SOMA.owl#Table_NCPFJOBW')
Object: 'http://www.ease-crc.org/ont/SOMA.owl#CerealBox_GZPBESQD'.
Sorting objects by position
Sort a list of objects from right to left (on the y axis from - to +) relative to the reference frame.Poses for robot interaction
Gets a position relative to the object based on the type of relation.
Valid Types are
perceive: (Optimal) Pose for the robot to position at to perceive the objectinteract: (Optimal) Pose for the robot to position at to interact with the object (eg. grasp with the gripper)destination: Returns the destination pose of an object. The destination pose is the pose where the object should be placed based on their predefined locations and current context. The destination might change over time.
Valid entries in the Options list are
direction(Dir)withDirbeing one of['-x', '+x', '-y', '+y']. This Option specifies the direction from which the robot should approach the object. For example, ifdirection('-x')is set, the position will have an x value that is smaller than the x value of the object. Currently this is only implemented for perceive. The default isdirection('-x').
This list might be expanded later.
object_rel_pose(+Object, +Type, -PoseStamped) is semidet.
object_rel_pose(+Object, +Type, +Options, -PoseStamped) is semidet.
Example:
?- object_rel_pose('http://www.ease-crc.org/ont/SOMA.owl#Table_YTORLZXJ', perceive, [direction('-x')], Pose).
Pose: ['iai_kitchen/long_table:table:table_front_edge_center', [-0.7, 0.0, 0.0], [0.0, 0.0, 0.0, 1.0]].
?- object_rel_pose('http://www.ease-crc.org/ont/SOMA.owl#CerealBox_JDHUPSME', destination, Pose).
Pose: ['iai_kitchen/shelf:shelf:shelf_base_center', [0.0, -0.1, 0.51], [0.0, 0.0, 0.0, 1.0]].
For more details, see src/model/object/object_rel_pose/README.md.
Predefined object names
To get the predefined RoboCup name of an object or class or the object class of a RoboCup name, use the following predicates.
Example:
?- has_predefined_name(Class, 'tomato soup').
Class: 'http://www.ease-crc.org/ont/SUTURO.owl#TomatoSoupCan'.
?- has_predefined_name(soma:'WineBottle', Name).
Name: red wine.
?- object_has_predefined_name('http://www.ease-crc.org/ont/SUTURO.owl#CerealBoxRoboCup_PCMOTGKZ', Name).
Name: cornflakes.
?- object_has_predefined_name(Object, snacks).
Object: 'http://www.ease-crc.org/ont/SUTURO.owl#CerealBoxRoboCup_PCMOTGKZ'.
Robocup Names
Example:
?- has_robocup_name(X,kitchen_table).
X: 'http://www.ease-crc.org/ont/SUTURO.owl#KitchenTable_DJXSUEFR'.
?- has_robocup_name('http://www.ease-crc.org/ont/SOMA.owl#Table_WZOPHBCM',Y).
Y: bed.
Get the knowledge_role assigned to a furniture in the semantic map. Make sure that the knowledge_role in there matches the robocup name.
Predefined object locations
Get the predefined origin and destination location of object classes. The predefined locations are the location (or reference object) where the object is placed at the beginning of the task or should be placed at the end of the task.
predefined_origin_location(+Class, -OriginLocation) is nondet.
predefined_destination_location(+Class, -DestinationLocation) is nondet.
Warning
For Serving Breakfast the predicate init_serve_breakfast. has to be called first to load/initialize the challenge specific predefined locations.
For Storing Groceries the predicate init_storing_groceries..
For Clean the Table the predicate init_clean_the_table..
For GPSR the predicate init_gpsr..
Example:
?- predefined_origin_location(soma:'Bowl', OriginLocation).
OriginLocation: 'http://www.ease-crc.org/ont/SOMA.owl#Shelf_FNSVGYRI'.
?- predefined_destination_location(soma:'Bowl', DestinationLocation).
DestinationLocation: 'http://www.ease-crc.org/ont/SOMA.owl#Table_BPXIQGES'.
Next best object
Gets the next best object to pick based on the current context.
This reasoner calculates the next best object to pick based on factors like the distance of the object to the robot and the destination location, the benefit (bonus points) and the confidence of the object detection by Perception.
Info
For next_object to work, the objects have to be created first with the create_object predicate.
Warning
For Serving Breakfast the predicate init_serve_breakfast. has to be called first for this to work.
For Storing Groceries the predicate init_storing_groceries..
For Clean the Table the predicate init_clean_the_table..
Example:
Object handled state
To update the handled state of an object and remove or add it to the possible next objects, use the following predicates:
Set objects to handled=true
Example:
Set objects to handled=false
Example:
Semantic similarity measure
The semantic similarity measure is useful for sorting and grouping objects by similarity or category.
Most similar object
Finds the most similar object to the given object from a list of input objects. May also find the Wu-Palmer similarity between the objects.
most_similar_object(+Object, +InputObjects, -MostSimilarObject) is semidet.
most_similar_object(+Object, +InputObjects, -MostSimilarObject, -Similarity) is semidet.
Example:
?- most_similar_object('http://www.ease-crc.org/ont/SUTURO.owl#Strawberry_FDMTIOJK', ['http://www.ease-crc.org/ont/SOMA.owl#CerealBox_QHUCMGZP', 'http://www.ease-crc.org/ont/SUTURO.owl#Banana_WRQHESGO', 'http://www.ease-crc.org/ont/SOMA.owl#Knife_SZIFXLCO'], Object).
Object: 'http://www.ease-crc.org/ont/SUTURO.owl#Banana_WRQHESGO'.
?- most_similar_object('http://www.ease-crc.org/ont/SUTURO.owl#Strawberry_PQWNGBUF', ['http://www.ease-crc.org/ont/SOMA.owl#CerealBox_VKPYRUIM', 'http://www.ease-crc.org/ont/SUTURO.owl#Tuna_UGDMHTNP'], Object, Similarity, Threshold).
Object: 'http://www.ease-crc.org/ont/SUTURO.owl#Tuna_UGDMHTNP',
Similarity: 0.75,
Wu-Palmer similarity
Calculates the Wu-Palmer similarity between two classes. The similarity can be 0 < similarity <= 1.
Example:
Rooms
See the rooms readme.
Utils
Resetting the data
Delete all objects, what challenge was initiliazied, etc and initialize the semantic map furnitures again.
Getting the object for a link name
This is useful for getting data about specific environment furniture, for example the tall table.
Example:
?- has_urdf_name(Object, URDFName).
Object: http://knowrob.org/kb/IAI-kitchen.owl#iai_kitchen_fridge_door_handle,
URDFName: iai_fridge_door_handle ;
Object: http://knowrob.org/kb/IAI-kitchen.owl#iai_kitchen_oven_area_area,
URDFName: oven_area_area ;
Object: http://www.ease-crc.org/ont/SOMA.owl#Table_LXEIYGPZ,
URDFName: long_table:table:table_front_edge_center ;
Object: http://www.ease-crc.org/ont/SOMA.owl#Table_MBOLQEWJ,
URDFName: tall_table:table:table_front_edge_center.
% Notice that there are single quotes around the urdf because it contains non [a-z_] characters.
?- has_urdf_name(Object, 'tall_table:table:table_front_edge_center').
Object: http://www.ease-crc.org/ont/SOMA.owl#Table_MBOLQEWJ.
?- furniture_creation:has_urdf_name('http://www.ease-crc.org/ont/SOMA.owl#Table_MBOLQEWJ', URDFName).
URDFName: tall_table:table:table_front_edge_center.
Getting the TF frame
Example:
?- has_tf_name('tall_table:table:table_front_edge_center',TFName).
TFName: iai_kitchen/tall_table:table:table_front_edge_center.
?- has_tf_name('http://www.ease-crc.org/ont/SOMA.owl#Table_LTKIUPNG', TFName).
TFName: iai_kitchen/tall_table:table:table_front_edge_center.
Troubleshooting
Drop roslog database
The roslog MongoDB database used in Knowledge increases relatively fast when working with the HSR.
To fix this, drop the roslog database on a regular bases. Execute this in the shell and restart Knowledge.